3D backbone¶
09-Nov-21
The motion along such three-dimensional comb structure can be simulated by the following coupled Langevin equations
where \(\zeta_{i}(t)\) (\(i=\{x,y, z\}\)) are white Gaussian noise with zero mean \(\langle\zeta_{i}(t)\rangle=0\), and correlation \(\langle\zeta_{i}(t)\zeta_{i}(t')\rangle=\delta(t-t')\), while the functions \(A(y)\) and \(B(z)\) are introduced to mimic the motion along the backbone at \(y=0\) and \(z=0\) acordingly. As a result, the noises \(\zeta_{x}(t), \zeta_{y}(t), \zeta_{z}(t)\) are multiplicative.
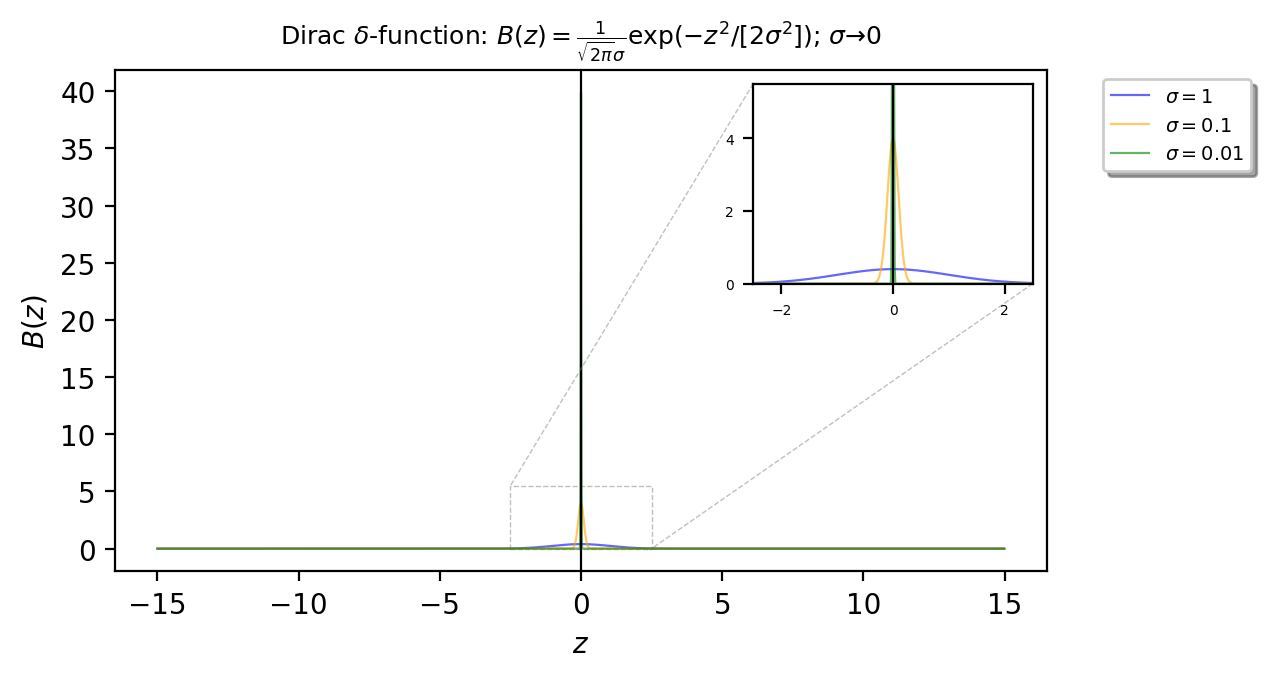
A. Mimicing the Dirac \(\delta\)-function, with \(A(y)\), \(B(z)\)¶
The approach to replicate the Dirac \(\delta\)-function in this notebook is to use \(A(y)=\delta(y)\) and then to employ some approximation formula for the Dirac \(\delta\)-function, for example \(A(y) = \frac{1}{\sqrt{2\pi}\sigma}\exp(-y^2/[2\sigma^2])\) in the limit \(\sigma\to 0\).
The function can by replicated by \(A(y) = \frac{1}{\sqrt{2\pi}\sigma}\exp(-y^2/[2\sigma^2])\) in the limit \(\sigma\to 0\), for different values for \(\sigma=[1, 0.1, 0.01]\).
On the other hand, the function \(B(z)=\delta(z)\) is the same formula for the Dirac \(\delta\)-function as \(A(y)\), but instead it beeing used for the y-axis it is for the z-axis. At a random point z, the function has value \(B(z) = \frac{1}{\sqrt{2\pi}\sigma}\exp(-z^2/[2\sigma^2])\), where the limit \(\sigma\to 0\).
# Python imports
import seaborn as sns
import matplotlib.pyplot as plt
import numpy as np
import math
from scipy.stats import norm
import warnings
from matplotlib.ticker import (MultipleLocator, AutoMinorLocator)
import plotly.graph_objs as go
import random
warnings.filterwarnings("ignore")
from mpl_toolkits.axes_grid1.inset_locator import mark_inset, inset_axes, zoomed_inset_axes
%matplotlib inline
figure, (ax) = plt.subplots(1, 1, figsize=(7, 4), dpi=200)
y = np.arange(-15,15,0.01)
# Calculate PDF for t=1, t=2 $ t=10
x_0 = 0
sig = [1, 0.1, 0.01]
f1 = 1/(2*np.pi)**0.5 * np.exp(-(y)**2/(2*sig[0]**2)) / sig[0]
f2 = 1/(2*np.pi)**0.5 * np.exp(-(y)**2/(2*sig[1]**2)) / sig[1]
f3 = 1/(2*np.pi)**0.5 * np.exp(-(y)**2/(2*sig[2]**2)) / sig[2]
# t=1
plt.plot(y, f1, linewidth=0.8, alpha=0.6, label=r"$\sigma=${}".format(sig[0]), color="blue")
# t=2
plt.plot(y, f2, linewidth=0.8, alpha=0.6, label=r"$\sigma=${}".format(sig[1]), color="orange")
# t=10
plt.plot(y, f3, linewidth=0.8, alpha=0.6, label=r"$\sigma=${}".format(sig[2]), color="green")
# Plot lines for reference
plt.axvline(x=0, linewidth=0.8, alpha=1, color="black")
# plt.axvline(x=V, linewidth=0.8, alpha=0.5, color="green", linestyle='--', label=r'$V$')
plt.title(
r"Dirac $\delta$-function: $B(z) = \frac{1}{\sqrt{2\pi}\sigma}\exp(-z^2/[2\sigma^2])$; $\sigma\to 0$",
fontsize=9, pad=9)
# Add legend if comparing values
plt.legend(bbox_to_anchor=(1.05, 1.0),
loc='upper left',
fancybox=True,
shadow=True,
fontsize='x-small')
plt.ylabel(r"$B(z)$")
plt.xlabel(r"$z$")
axins = inset_axes(ax,
width="30%", # width = 30% of parent_bbox
height=1., # height : 1 inch
loc=1)
# t=1
axins.plot(y, f1, linewidth=0.8, alpha=0.6, label=r"$\sigma=${}".format(sig[0]), color="blue")
# t=2
axins.plot(y, f2, linewidth=0.8, alpha=0.6, label=r"$\sigma=${}".format(sig[1]), color="orange")
# t=10
axins.plot(y, f3, linewidth=0.8, alpha=0.6, label=r"$\sigma=${}".format(sig[2]), color="green")
# Plot lines for reference
axins.axvline(x=0, linewidth=0.8, alpha=1, color="black")
# x1, x2, y1, y2 = -1.5, -0.9, -2.5, -1.9
axins.set_xlim(-2.5, 2.5)
axins.set_ylim(0, 5.5)
plt.xticks(fontsize=5)
plt.yticks(fontsize=5)
mark_inset(ax, axins, loc1=2, loc2=4, fc="none", ec="0.5", alpha=0.5, linewidth=0.5, linestyle="--")
plt.tight_layout(pad=2.9)
ax.tick_params(direction="in", which='minor', length=1.5, top=True, right=True)
plt.show()
Running a simple check for the value at zero:
def B(z=0, sig=0.05, pi=np.pi):
f1 = 1/(2*np.pi)**0.5 * np.exp(-(z)**2/(2*sig**2)) / sig
return f1
print("B(z)=", B())
B(z)= 7.978845608028654
B. Modeling the dimensions¶
Main class for 3D backbone:
"""
Created on 26-Oct-2021
@author: zelenkastiot
bm-speed:
"""
import time
from tqdm import tqdm
import matplotlib.pyplot as plt
import numpy as np
import warnings
import random
from matplotlib.ticker import (AutoMinorLocator)
from math import gamma
import psutil
from multiprocessing import Pool
# Get number of CPU cores
num_cpus = psutil.cpu_count(logical=False)
warnings.filterwarnings("ignore")
# Specifying the figure parameters
font = {'family': 'serif',
'color': 'black',
'weight': 'normal',
'size': 18,
}
params = {'legend.fontsize': 10,
'legend.handlelength': 2.}
plt.rcParams.update(params)
reset_points = []
# Brownian motion stochastic process
class BrownianMotionLangevin:
"""
This class contains methods that solve different variations of the Brownian motion stochastic process:
*time_1d_reset - 1D Brownian motion, Langevin Eq., with stochastic resetting
*time_1d_regular - 1D Brownian motion, Langevin Eq., no stochastic resetting
*time_2d_regular - 2D Brownian motion, 2D comb, Langevin Eq., no stochastic resetting
*time_3d_regular - 3D Brownian motion, 3D comb, Langevin Eq., no stochastic resetting
"""
# Function for validating # of coefficients
def check_coefficients(self, diffusion_coefficients):
"""
Simple input check for # of diffusion coefficients.
If not valid (logical) raises warning with message
:param diffusion_coefficients: List of dc
:return: None
"""
if self.ensemble_type == '1d':
if len(diffusion_coefficients) == 1:
self.diffusion_coefficient_x = diffusion_coefficients[0]
else:
raise ValueError(
"You must have one (Dx) diffusion coefficient!"
)
if self.ensemble_type == '2d':
if len(diffusion_coefficients) == 2:
self.diffusion_coefficient_x = diffusion_coefficients[0]
self.diffusion_coefficient_y = diffusion_coefficients[1]
else:
raise ValueError(
"You must have exactly two (Dx, Dy) diffusion coefficients!"
)
if self.ensemble_type == '3d':
if len(diffusion_coefficients) == 3:
self.diffusion_coefficient_x = diffusion_coefficients[0]
self.diffusion_coefficient_y = diffusion_coefficients[1]
self.diffusion_coefficient_z = diffusion_coefficients[2]
else:
raise ValueError(
"You must have exactly three (Dx, Dy, Dz) diffusion coefficients!"
)
# A(y): Mimicking the Dirac-delta function on axis Y
def A(self, y=0):
"""
Mimicking the Dirac-delta function on axis Y
:param self: Brownian motion object
:param y - value we are interested in ~ A(y)
"""
# Calculate A(y)
f1 = 1 / (2 * np.pi) ** 0.5 * np.exp(-y ** 2 / (2 * self.sigma ** 2)) / self.sigma
# Return the square (since we use it inside the square root)
return f1 ** 0.5
# B(z): Mimicking the Dirac-delta function on axis Z
def B(self, z=0):
"""
Mimicking the Dirac-delta function on axis Z
:param self: Brownian motion object
:param z - value we are interested in ~ B(z)
"""
# Calculate A(y)
f2 = 1 / (2 * np.pi) ** 0.5 * np.exp(-z ** 2 / (2 * self.sigma ** 2)) / self.sigma
# Return the square (since we use it inside the square root)
return f2 ** 0.5
# Special case: Returns the reset points for 1D Brownian motion with stochastic resetting
def time_1d_reset_plot(self):
prob_reset = self.reset_rate * self.dt
# Define the solution as [dimension, time] (in this case 1)
s = np.zeros((len(self.times)))
s[0] = 0
# Loop over time
for t in range(1, len(self.times) - 1):
step = np.random.uniform(0, 1)
if step < prob_reset:
s[t + 1] = s[0]
self.reset_points.append(t + 1)
else:
dwx = self.drift * self.dt + self.sqrt_2Dx * self.sqrt_dt * np.random.normal()
s[t + 1] = s[t] + dwx
return s
# 1st: Function for enhancing speed
def time_1d_reset(self, i=0):
prob_reset = self.reset_rate * self.dt
# Define the solution as [dimension, time] (in this case 1)
s = np.zeros((len(self.times)))
s[0] = 0
# Loop over time
for t in range(1, len(self.times) - 1):
step = np.random.uniform(0, 1)
if step < prob_reset:
s[t + 1] = s[0]
else:
dwx = self.drift * self.dt + self.sqrt_2Dx * self.sqrt_dt * np.random.normal()
s[t + 1] = s[t] + dwx
return s
# 2nd: Function for enhancing speed
def time_1d_regular(self, i=0):
s = np.zeros((len(self.times)))
# Loop over time
for t in range(len(self.times) - 1):
s[t + 1] = s[t] + self.drift * self.dt + self.sqrt_2Dx * self.sqrt_dt * np.random.normal()
return s
# 3rd: Function for enhancing speed
def time_2d_regular(self, i=0):
# Define the solution as [dimension, time] (in this case 2)
s2 = np.zeros((2, len(self.times)))
# Loop over time
for t in range(len(self.times) - 1):
# Calculate white gaussian noise ~ (2*Dc*dt)^0.5 * N(0, 1)
dwx = self.sqrt_2Dx * self.sqrt_dt * np.random.normal()
dwy = self.sqrt_2Dy * self.sqrt_dt * np.random.normal()
# Y - axis: Langevin eq. y[t + 1] = y[t] + (2*Dy*dt)^0.5 * N(0, 1)
s2[1][t + 1] = s2[1][t] + dwx
# X - axis: Langevin eq. x[t + 1] = x[t] + A(y[t])*(2*Dy*dt)^0.5 * N(0, 1)
s2[0][t + 1] = s2[0][t] + 0.5 * (self.A(s2[1][t]) + self.A(s2[1][t + 1])) * dwy
return s2
# 4th: Function for enhancing speed
def time_3d_regular(self, i=0):
s3 = np.zeros((3, len(self.times)))
for t in range(len(self.times) - 1):
# Calculate white gaussian noise ~ (2*Dc*dt)^0.5 * N(0, 1)
dwx = self.sqrt_2Dx * self.sqrt_dt * np.random.normal()
dwy = self.sqrt_2Dy * self.sqrt_dt * np.random.normal()
dwz = self.sqrt_2Dz * self.sqrt_dt * np.random.normal()
# Z - axis: Langevin eq. z[t + 1] = z[t] + dwz
s3[2][t + 1] = s3[2][t] + dwz
# Y - axis: Langevin eq. y[t + 1] = y[t] + 0.5 * (B(z[t]) + B(z[t + 1]) * dwy
s3[1][t + 1] = s3[1][t] + 0.5 * (self.B(s3[2][t]) + self.B(s3[2][t + 1])) * dwy
# X - axis: Langevin eq. x[t + 1] = x[t] + 0.5 * { A(y[t]) * B(z[t]) + A(y[t+1]) * B(z[t+1]) } * dwx
s3[0][t + 1] = s3[0][t] + 0.5 * (
self.A(s3[1][t]) * self.B(s3[2][t]) + self.A(s3[1][t + 1]) * self.B(s3[2][t + 1])) * dwx
return s3
# Solving 1D
def solve(self):
"""
Regular Brownian Motion
Generates all step based the definition for BM, using 2 different approaches.
Both draw from a Normal Distribution ~ N(0, dt); If dt=1, it is N(0, 1)
B = B0 + B1*dB1 + ... Bn*dBn = x + v*dt + (2*Dc*dt)^1/2 * N(0, dt)
:return: None
"""
if self.reset_rate is not None:
# Run ensemble
print("-------------Started calculating ensemble (1D, RESET)---------------")
pool = Pool(self.num_cores)
monte_carlo1d = list(
tqdm(pool.imap(self.time_1d_reset, range(self.ensemble_size)), total=self.ensemble_size))
pool.terminate()
else:
# Run ensemble
print("-------------Started calculating ensemble (1D, NO RESET)------------")
pool = Pool(self.num_cores)
monte_carlo1d = list(
tqdm(pool.imap(self.time_1d_regular, range(self.ensemble_size)), total=self.ensemble_size))
pool.terminate()
# Append solution
self.solution = monte_carlo1d
# Solving 2D
def solve2d(self):
"""
Backbone solution - 2d
Generates all step based the definition of the backbone.
- 1st dimension [x] - non-Brownian variable; distribution of waiting
- 2nd dimension [y] - Brownian motion variable
Returns the 2D solution of shape (dimension)(values at t time)
:return: None
"""
if self.reset_rate is not None:
# Run ensemble
print("----- WORK IN PROGRESS ----")
monte_carlo2d = None
else:
# Run ensemble
print("-------------Started calculating ensemble (2D, NO RESET)------------")
pool = Pool(self.num_cores)
monte_carlo2d = list(
tqdm(pool.imap(self.time_2d_regular, range(self.ensemble_size)), total=self.ensemble_size))
pool.terminate()
# Append solution
self.solution = monte_carlo2d
# Solving 3D
def solve3d(self):
"""
Backbone solution - 3d
Generates all step based the definition of the backbone.
- 1st dimension [x] - non-Brownian variable - 1; distribution of waiting
- 2nd dimension [y] - non-Brownian variable - 2; distribution of waiting
- 3rd dimension [z] - Brownian motion variable
Returns the 2D solution of shape (dimension)(values at t time)
:return: r
"""
if self.reset_rate is not None:
# Run ensemble
print("----- WORK IN PROGRESS ----")
monte_carlo3d = None
else:
# Run ensemble
print("----- Started calculating ensemble (3D, NO RESET) ----")
pool = Pool(self.num_cores)
monte_carlo3d = list(
tqdm(pool.imap(self.time_3d_regular, range(self.ensemble_size)), total=self.ensemble_size))
pool.terminate()
self.solution = monte_carlo3d
# Functions that runs ensemble using multiprocessing
def run_ensemble(self):
# 1d - regular BM
if self.ensemble_type == '1d':
self.solve()
# 2d - 2d comb BM
elif self.ensemble_type == '2d':
self.solve2d()
# 3d - 3d comb BM
elif self.ensemble_type == '3d':
self.solve3d()
# No valid options
else:
raise ValueError(
"Invalid option for 'ensemble type'!",
"\n\t Options are:",
" - '1d'",
"\n\t\t - '2d'",
"\n\t\t - '3d'"
)
# plt_traj==True: Plots trajectories
def plot_trajectories(self):
"""
:return:
"""
if self.reset_rate is not None:
if self.ensemble_type == '1d':
# Matplotlib subplot
fig, (ax0) = plt.subplots(1, 1, figsize=(5, 4), dpi=120)
# Get parameters
Dcx = self.diffusion_coefficient_x
rate = self.reset_rate
dt = self.dt
r = self.time_1d_reset_plot()
# print(self.reset_points)
# Plot the two axis
times = np.arange(0, self.simulation_time + 1, self.dt)
plt.axhline(y=0, linewidth=1, alpha=0.9, color="black", linestyle='--')
# X-axis
ax0.scatter(self.reset_points, [0] * (len(self.reset_points)), c="black", s=30,
zorder=2)
ax0.plot(times, r, color="#045a8d", linewidth=0.9, zorder=1)
ax0.set_xlabel(r'time, $t$')
ax0.set_ylabel(r'$x(t)$')
ax0.tick_params(direction="in", which='minor', length=1.5, top=True, right=True)
if self.simulation_time == 10_000:
ax0.set_xticklabels(
["0", r"2$\times 10^3$", r"4$\times 10^3$", r"6$\times 10^3$", r"8$\times 10^3$", r"$10^4$"])
elif self.simulation_time == 100_000:
ax0.set_xticklabels(
["0", r"2$\times 10^4$", r"4$\times 10^4$", r"6$\times 10^4$", r"8$\times 10^4$", r"$10^5$"])
for i in range(len(self.reset_points)):
fill_color = '#cddee8' if i % 2 == 0 else 'white'
first = self.reset_points[i]
last = 10 ** 4 if i == len(self.reset_points) - 1 else self.reset_points[i + 1]
ax0.axvspan(first, last, color=fill_color, alpha=0.5, lw=0, zorder=0)
plt.xlim(0, self.simulation_time)
plt.title(
r"Trajectory for X, stochastic reset $\mathcal{D}_x=$" + f"{Dcx}, " + r"$r=${rate}, $\Delta t=${dt}".format(
rate=rate, dt=dt), fontsize=9)
plt.tight_layout(pad=1)
# plt.savefig("Trajectory.png")
plt.show()
elif self.ensemble_type == '2d':
pass
elif self.ensemble_type == '3d':
pass
else:
pass
else:
if self.ensemble_type == '1d':
# Matplotlib subplot
fig, (ax0) = plt.subplots(1, 1, figsize=(5, 4), dpi=120)
Dcx = self.diffusion_coefficient_x
dt = self.dt
motions = self.solution
r = motions[0]
# Plot the two axis
times = np.arange(0, self.simulation_time + 1, dt)
plt.axhline(y=0, linewidth=1, alpha=0.9, color="black", linestyle='--')
ax0.plot(times, r, color="#045a8d", linewidth=0.9, zorder=1)
ax0.set_xlabel(r'time, $t$')
ax0.set_ylabel(r'$x(t)$')
ax0.tick_params(direction="in", which='minor', length=1.5, top=True, right=True)
if self.simulation_time == 10_000:
ax0.set_xticklabels(
["0", r"2$\times 10^3$", r"4$\times 10^3$", r"6$\times 10^3$", r"8$\times 10^3$", r"$10^4$"])
elif self.simulation_time == 100_000:
ax0.set_xticklabels(
["0", r"2$\times 10^4$", r"4$\times 10^4$", r"6$\times 10^4$", r"8$\times 10^4$", r"$10^5$"])
plt.xlim(0, self.simulation_time)
plt.title(r"Trajectory for X; $\mathcal{D}_x=$" + r"{Dc}, $\Delta t=${dt}".format(Dc=Dcx, dt=dt),
fontsize=9)
plt.tight_layout(pad=1)
# plt.savefig("Trajectory-1d-no-reset.png")
plt.show()
elif self.ensemble_type == '2d':
# Matplotlib subplot
figure, (ax1, ax2) = plt.subplots(1, 2, figsize=(9, 4), dpi=250)
# Pick random motion from ensemble; Plot both trajectories
motions = self.solution
N = np.shape(motions)[0]
rand_motion = random.randint(0, N - 1)
r = motions[rand_motion]
# Get parameters from ensemble
Dcx = self.diffusion_coefficient_x
Dcy = self.diffusion_coefficient_y
dt = self.dt
total_time = self.simulation_time
t = np.arange(0, total_time + 1, 1)
# X(t)
ax1.plot(t, r[0], color="#346751")
ax1.set_xlabel(r'time, $t$')
ax1.set_ylabel(r'$x(t)$')
ax1.axhline(y=0, linewidth=1, alpha=0.9, color="black", linestyle='--')
ax1.set_title(r"$\mathcal{D}_x=$" + f"{Dcx}", fontsize=9)
ax1.set_xlim(0, total_time)
# Y(t)
ax2.plot(t, r[1], color="#346751")
ax2.set_xlabel(r'time, $t$')
ax2.set_ylabel(r'$y(t)$')
ax2.axhline(y=0, linewidth=1, alpha=0.9, color="black", linestyle='--')
ax2.set_title(r"$\mathcal{D}_y=$" + f"{Dcy}", fontsize=9)
ax2.set_xlim(0, total_time)
if self.simulation_time == 10_000:
ax1.set_xticklabels(
["0", r"2$\times 10^3$", r"4$\times 10^3$", r"6$\times 10^3$", r"8$\times 10^3$", r"$10^4$"])
ax2.set_xticklabels(
["0", r"2$\times 10^3$", r"4$\times 10^3$", r"6$\times 10^3$", r"8$\times 10^3$", r"$10^4$"])
elif self.simulation_time == 100_000:
ax1.set_xticklabels(
["0", r"2$\times 10^4$", r"4$\times 10^4$", r"6$\times 10^4$", r"8$\times 10^4$", r"$10^5$"])
ax2.set_xticklabels(
["0", r"2$\times 10^4$", r"4$\times 10^4$", r"6$\times 10^4$", r"8$\times 10^4$", r"$10^5$"])
# Final touches
plt.suptitle(r"Trajectories for $X,Y$; $\Delta t=${dt}".format(dt=dt), fontsize=10)
plt.tight_layout(pad=1)
# plt.savefig("Trajectories-2d-no-reset.png")
plt.show()
elif self.ensemble_type == '3d':
# Matplotlib subplot
figure, (ax1, ax2, ax3) = plt.subplots(1, 3, figsize=(14, 4), dpi=150)
# Pick random motion from ensemble; Plot both trajectories
motions = self.solution
N = np.shape(motions)[0]
rand_motion = random.randint(0, N - 1)
r = motions[rand_motion]
# Get parameters from ensemble
Dcx = self.diffusion_coefficient_x
Dcy = self.diffusion_coefficient_y
Dcz = self.diffusion_coefficient_z
dt = self.dt
total_time = self.simulation_time
t = np.arange(0, total_time + 1, 1)
# X(t)
ax1.plot(t, r[0], color="#346751")
ax1.set_xlabel(r'time, $t$')
ax1.set_ylabel(r'$x(t)$')
ax1.axhline(y=0, linewidth=1, alpha=0.9, color="black", linestyle='--')
ax1.set_title(r"$\mathcal{D}_x=$" + f"{Dcx}", fontsize=9)
ax1.set_xlim(0, total_time)
# Y(t)
ax2.plot(t, r[1], color="#346751")
ax2.set_xlabel(r'time, $t$')
ax2.set_ylabel(r'$y(t)$')
ax2.axhline(y=0, linewidth=1, alpha=0.9, color="black", linestyle='--')
ax2.set_title(r"$\mathcal{D}_y=$" + f"{Dcy}", fontsize=9)
ax2.set_xlim(0, total_time)
# Z(t)
ax3.plot(t, r[2], color="#346751")
ax3.set_xlabel(r'time, $t$')
ax3.set_ylabel(r'$z(t)$')
ax3.axhline(y=0, linewidth=1, alpha=0.9, color="black", linestyle='--')
ax3.set_title(r"$\mathcal{D}_z=$" + f"{Dcz}", fontsize=9)
ax3.set_xlim(0, total_time)
if self.simulation_time == 10_000:
ax1.set_xticklabels(
["0", r"2$\times 10^3$", r"4$\times 10^3$", r"6$\times 10^3$", r"8$\times 10^3$", r"$10^4$"])
ax2.set_xticklabels(
["0", r"2$\times 10^3$", r"4$\times 10^3$", r"6$\times 10^3$", r"8$\times 10^3$", r"$10^4$"])
ax3.set_xticklabels(
["0", r"2$\times 10^3$", r"4$\times 10^3$", r"6$\times 10^3$", r"8$\times 10^3$", r"$10^4$"])
elif self.simulation_time == 100_000:
ax1.set_xticklabels(
["0", r"2$\times 10^4$", r"4$\times 10^4$", r"6$\times 10^4$", r"8$\times 10^4$", r"$10^5$"])
ax2.set_xticklabels(
["0", r"2$\times 10^4$", r"4$\times 10^4$", r"6$\times 10^4$", r"8$\times 10^4$", r"$10^5$"])
ax3.set_xticklabels(
["0", r"2$\times 10^4$", r"4$\times 10^4$", r"6$\times 10^4$", r"8$\times 10^4$", r"$10^5$"])
# Final touches
plt.suptitle(r"Trajectories for $X$, $Y$ and $Z$ for random particle; $\Delta t=${dt}".format(dt=dt),
fontsize=10)
plt.tight_layout(pad=2)
# plt.savefig("Trajectories-2d-no-reset.png")
plt.show()
else:
pass
# plt_msd==True: Plots MSD
def plot_msd(self):
"""
:return:
"""
# Stochastic resetting
if self.reset_rate is not None:
# DONE
if self.ensemble_type == '1d':
dist_x = []
for i in range(0, self.ensemble_size):
dist_x.append(self.solution[i])
# Define global time of ensemble
x = np.arange(0, self.simulation_time + 1)
# Calculate MSD Simulation --------------- X
no_simulations, no_points = np.shape(dist_x)
msd_s = []
print("\n--------Started calculating MSD, X, stochastic resetting--------")
time.sleep(0.1)
for t in tqdm(range(no_points)):
value_x = [dist_x[i][t] for i in range(self.ensemble_size)]
value = np.dot(value_x, value_x) / self.ensemble_size # dot product / ensemble size
msd_s.append(value)
# Theoretical vs. Ensemble
fig, (ax) = plt.subplots(1, 1, figsize=(6, 4), dpi=180)
ax.xaxis.set_minor_locator(AutoMinorLocator())
ax.yaxis.set_minor_locator(AutoMinorLocator())
# MSD - analytical: No resetting
msd_t = 2 * self.diffusion_coefficient_x * x
ax.plot(x, msd_t, linewidth=0.7, alpha=0.8, label=r"$2\mathcal{D}_xt$", color="red", linestyle='--')
# MSD - analytical: With resetting rate r
msd_a = 2 * self.diffusion_coefficient_x * (1 - np.exp(-self.reset_rate * x)) / self.reset_rate
ax.plot(x, msd_a, linewidth=0.7, alpha=0.8, label=r"$2\mathcal{D}_x\frac{1-e^{-rt}}{r}$",
color="#2C2891")
# Plot simulation
ax.plot(x, msd_s, linewidth=0.8, alpha=0.9, label=r"Simulation, reset", color='#FB9300')
# Add legend if comparing values
plt.legend(loc='upper left',
fancybox=True,
shadow=True,
fontsize='x-small')
ax.set_yscale('log')
ax.set_xscale('log')
plt.ylabel(r"$\langle x^2(t) \rangle$")
plt.xlabel(r"time, $t$")
plt.title(r"MSD; $\langle x^2(t) \rangle$" + "$; r=${rate}, $\Delta t=${dt}".format(
rate=self.reset_rate, dt=self.dt), fontsize=9)
plt.tight_layout(pad=1.9)
ax.tick_params(direction="in", which='minor', length=1.5, top=True, right=True)
# plt.savefig("MSD-reset-1d.png")
plt.show()
elif self.ensemble_type == '2d':
pass
elif self.ensemble_type == '3d':
pass
else:
pass
# No resetting
else:
# DONE
if self.ensemble_type == '1d':
dist_x = []
for i in range(0, n):
dist_x.append(self.solution[i])
print("\n-------------------MSD, no stochastic resetting---------------------")
print("Dist. for X has shape: {x}".format(x=np.shape(dist_x)))
# Calculate MSD Simulation --------------- X
no_simulations, no_points = np.shape(dist_x)
msd_s = []
print("---------Started calculating MSD, X, no stochastic resetting--------")
time.sleep(0.1)
for t in tqdm(range(no_points)):
value_x = [dist_x[i][t] for i in range(self.ensemble_size)]
value = np.dot(value_x, value_x) / self.ensemble_size # dot product / ensemble size
msd_s.append(value)
# Theoretical vs. Ensemble
fig, (ax) = plt.subplots(1, 1, figsize=(6, 4), dpi=180)
ax.xaxis.set_minor_locator(AutoMinorLocator())
ax.yaxis.set_minor_locator(AutoMinorLocator())
# Define global time of ensemble
x = np.arange(0, self.simulation_time + 1)
# MSD - analytical: No resetting
msd_t = 2 * self.diffusion_coefficient_x * x
ax.plot(x, msd_t, linewidth=0.7, alpha=0.8, label=r"$2\mathcal{D}_xt$", color="#2C2891")
ax.plot(x, msd_s, linewidth=0.8, alpha=0.9, label=r"Simulation, no reset", color='#FB9300')
# Add legend if comparing values
plt.legend(loc='upper left',
fancybox=True,
shadow=True,
fontsize='x-small')
ax.set_yscale('log')
ax.set_xscale('log')
plt.ylabel(r"$\langle x^2(t) \rangle$")
plt.xlabel(r"time, $t$")
plt.title(r"MSD; $\langle x^2(t) \rangle$; " + "$\Delta t=${dt}".format(dt=self.dt), fontsize=9)
plt.tight_layout(pad=1.9)
ax.tick_params(direction="in", which='minor', length=1.5, top=True, right=True)
# plt.savefig("MSD-no-reset-1d.png")
plt.show()
# DONE
elif self.ensemble_type == '2d':
dist_x = []
dist_y = []
for i in range(0, self.ensemble_size):
dist_x.append(self.solution[i][0])
dist_y.append(self.solution[i][1])
print("\n-------------------MSD, no stochastic resetting---------------------")
print("Dist. for X has shape: {x}".format(x=np.shape(dist_x)))
print("Dist. for Y has shape: {y}".format(y=np.shape(dist_y)))
# Calculate MSD for X
no_simulations, no_points = np.shape(dist_x)
msd_x = []
print("---------Started calculating MSD, X, no stochastic resetting--------")
time.sleep(0.1)
for t in tqdm(range(no_points - 1)):
value_x = [dist_x[i][t] for i in range(self.ensemble_size)]
value = np.dot(value_x, value_x) / self.ensemble_size # dot product / ensemble size
msd_x.append(value)
# Calculate MSD for Y
no_simulations, no_points = np.shape(dist_y)
msd_y = []
print("---------Started calculating MSD, Y, no stochastic resetting--------")
time.sleep(0.1)
for t in tqdm(range(no_points - 1)):
value_y = [dist_y[i][t] for i in range(self.ensemble_size)]
value = np.dot(value_y, value_y) / self.ensemble_size # dot product / ensemble size
msd_y.append(value)
# Theoretical vs. Ensemble
figure, (ax) = plt.subplots(1, 1, figsize=(4, 4), dpi=150)
ax.xaxis.set_minor_locator(AutoMinorLocator())
ax.yaxis.set_minor_locator(AutoMinorLocator())
x = np.arange(1, self.simulation_time + 1)
factor = 2 * self.diffusion_coefficient_x / (2 * self.diffusion_coefficient_y ** 0.5)
ax.plot(x, (lambda x: factor * x ** 0.5)(x), linewidth=0.7, alpha=0.9,
label=r"Theory, X, $t^{1/2}$",
color="#2C2891")
ax.plot(x, msd_x, '#FB9300', markersize=1, linewidth=0.7, alpha=0.9, label=r"Simulation, X",
markevery=30)
ax.plot(x, (lambda x: 2 * self.diffusion_coefficient_y * x ** 1)(x), linewidth=0.7, alpha=0.7,
label=r"Theory, Y, $t^1$",
color="#2C2891")
ax.plot(x, msd_y, '#FB9300', markersize=1, linewidth=0.7, alpha=0.9, label=r"Simulation, Y",
markevery=30)
# Add legend if comparing values
plt.legend(loc='upper left',
fancybox=True,
shadow=True,
fontsize='x-small')
ax.set_yscale('log')
ax.set_xscale('log')
plt.ylabel(r"")
plt.xlabel(r"time, $t$")
plt.title(r"MSD; $\langle x^2(t)\rangle,\langle y^2(t)\rangle$",
fontsize=9, pad=10)
plt.tight_layout(pad=1.9)
ax.tick_params(direction="in", which='minor', length=1.5, top=True, right=True)
plt.show()
# DONE
elif self.ensemble_type == '3d':
dist_x = []
dist_y = []
dist_z = []
for i in range(0, self.ensemble_size):
dist_x.append(self.solution[i][0])
dist_y.append(self.solution[i][1])
dist_z.append(self.solution[i][2])
print("\n-------------------MSD, no stochastic resetting---------------------")
print("Dist. for X has shape: {x}".format(x=np.shape(dist_x)))
print("Dist. for Y has shape: {y}".format(y=np.shape(dist_y)))
print("Dist. for Z has shape: {z}".format(z=np.shape(dist_z)))
# Calculate MSD for X
no_simulations, no_points = np.shape(dist_x)
msd_x = []
print("---------Started calculating MSD, X, no stochastic resetting--------")
time.sleep(0.1)
for t in tqdm(range(no_points - 1)):
value_x = [dist_x[i][t] for i in range(self.ensemble_size)]
value = np.dot(value_x, value_x) / self.ensemble_size # dot product / ensemble size
msd_x.append(value)
# Calculate MSD for Y
no_simulations, no_points = np.shape(dist_y)
msd_y = []
print("---------Started calculating MSD, Y, no stochastic resetting--------")
time.sleep(0.1)
for t in tqdm(range(no_points - 1)):
value_y = [dist_y[i][t] for i in range(self.ensemble_size)]
value = np.dot(value_y, value_y) / self.ensemble_size # dot product / ensemble size
msd_y.append(value)
# Calculate MSD for Z
no_simulations, no_points = np.shape(dist_z)
msd_z = []
print("---------Started calculating MSD, Z, no stochastic resetting--------")
time.sleep(0.1)
for t in tqdm(range(no_points - 1)):
value_z = [dist_z[i][t] for i in range(self.ensemble_size)]
value = np.dot(value_z, value_z) / self.ensemble_size # dot product / ensemble size
msd_z.append(value)
print("\n")
# Theoretical vs. Ensemble
figure, (ax) = plt.subplots(1, 1, figsize=(4, 4), dpi=150)
ax.xaxis.set_minor_locator(AutoMinorLocator())
ax.yaxis.set_minor_locator(AutoMinorLocator())
x = np.arange(1, self.simulation_time + 1)
# Analytical D1
D1 = self.diffusion_coefficient_x / (
2 * np.sqrt(2 * self.diffusion_coefficient_y * np.sqrt(self.diffusion_coefficient_z)))
factor_x = 2 * D1 / gamma(5 / 4)
# Analytical D2
D2 = self.diffusion_coefficient_y / (2 * np.sqrt(self.diffusion_coefficient_z))
factor_y = 2 * D2 / gamma(3 / 2)
ax.plot(x, (lambda x: factor_x * x ** 0.25)(x), linewidth=0.7, alpha=0.9,
label=r"Theory, X, $t^{1/4}$",
color='#FB9300')
ax.plot(x, msd_x, 'green', markersize=1, linewidth=0.7, alpha=0.9, label=r"Simulation, X",
markevery=30)
ax.plot(x, (lambda x: factor_y * x ** 0.5)(x), linewidth=0.7, alpha=0.7,
label=r"Theory, Y, $t^{1/2}$",
color='#FB9300')
ax.plot(x, msd_y, 'red', markersize=1, linewidth=0.7, alpha=0.9, label=r"Simulation, Y",
markevery=30)
ax.plot(x, (lambda x: 2 * self.diffusion_coefficient_z * x ** 1)(x), linewidth=0.7, alpha=0.7,
label=r"Theory, Z, $t^1$",
color='#FB9300')
ax.plot(x, msd_z, 'blue', markersize=1, linewidth=0.7, alpha=0.9, label=r"Simulation, Z",
markevery=30)
# Add legend if comparing values
plt.legend(loc='upper left',
fancybox=True,
shadow=True,
fontsize='x-small')
ax.set_yscale('log')
ax.set_xscale('log')
plt.ylabel(r"")
plt.xlabel(r"time, $t$")
plt.title(r"MSD; $\langle x^2(t)\rangle,\langle y^2(t)\rangle, \langle z^2(t)\rangle$",
fontsize=9, pad=10)
plt.tight_layout(pad=1.9)
ax.tick_params(direction="in", which='minor', length=1.5, top=True, right=True)
plt.show()
else:
pass
# plt_pdf==True: Plots PDF
def plot_pdf(self):
print("Under construction....")
def __init__(self, ensemble_size, ensemble_type, drift, diffusion_coefficients, reset_rate, sigma, y0,
simulation_time, dt, plt_traj, plt_msd):
"""
:param ensemble_size: Number of motions to simulate
:param ensemble_type: Can be one of:
- '1D': simple brownian motion
- '2D': two dimensional comb
- '3D': three dimensional comb
:param drift: External force - drift
:param diffusion_coefficients: List of 1, 2 or 3 diffusion coefficients
:param sigma: scaling factor for Dirac mimic function, A(y) or B(z). For larger sigma, bigger values for near 0
:param y0: starting point (if one exists)
:param simulation_time: total time for simulation
:param dt: dt - change in time - size of each interval
:param plt_traj: flag - True (plots trajectories)
:param plt_msd: flag - True (plots msd)
"""
# Initial parameters
self.num_cores = 3
self.ensemble_size = ensemble_size
self.ensemble_type = ensemble_type
self.drift = drift
self.reset_rate = reset_rate
self.reset_points = []
self.diffusion_coefficient_x = 0
self.diffusion_coefficient_y = 0
self.diffusion_coefficient_z = 0
self.check_coefficients(diffusion_coefficients) # Run check and set diffusion coefficients
self.initial_y = y0
self.sigma = sigma
# Define time
self.simulation_time = simulation_time
self.dt = dt
self.times = np.arange(0, simulation_time + 1, self.dt)
# Speed up calculations
self.sqrt_dt = self.dt ** 0.5
self.sqrt_2Dx = (2 * self.diffusion_coefficient_x) ** 0.5
self.sqrt_2Dy = (2 * self.diffusion_coefficient_y) ** 0.5
self.sqrt_2Dz = (2 * self.diffusion_coefficient_z) ** 0.5
# Create solution, call methods for solving
self.solution = []
self.run_ensemble()
# Plot trajectories
if plt_traj:
self.plot_trajectories()
# Plot MSD
if plt_msd:
self.plot_msd()
In the second approach to replicate the Dirac \(\delta\) function, diffusion across the x and y directions is permitted in a narrow band of thickness 2ε along the x and y axes. As a result, the noise in Eqs. (36a) and (36b) is multiplicative, however in Refs. [47,48] the authors verified that the value ε has no influence in the diffusive process, as long as ε and the noise amplitudes \(\beta_1, \beta_2, \beta_3\) are of the same order of magnitude.
But in this approach, we use the gaussian aproximation of the \(\delta\) function, and if we set the \(\sigma=\beta_1=\beta_2=\beta_3=0.1\), then it follows that \(\beta_i=\sqrt{2\mathcal{D}_i}=0.1\) making the diffusion coefficients \(\mathcal{D}_i=\frac{\beta_i^2}{2}=0.005\).
Using the equations:
\(\mathcal{D}_1=\frac{\mathcal{D}_x}{2\sqrt{2\mathcal{D}_y\sqrt{\mathcal{D}_z}}}\)
\(\mathcal{D}_2=\frac{\mathcal{D}_y}{2\sqrt{\mathcal{D}_z}}\)
\(\mathcal{D}_3=\mathcal{D}_y\)
If we set \(\mathcal{D}_i=\frac{\beta_i^2}{2}=0.005\):
D1 = D2 = D3 = 0.005
Then the values are:
Dz = D3
Dy = D2 * 2*np.sqrt(Dz)
Dx = D1 * 2 * np.sqrt(2*Dy*np.sqrt(Dz))
print(f"Dx: {Dx:.6f}")
print(f"Dy: {Dy:.6f}")
print(f"Dz: {Dz:.6f}")
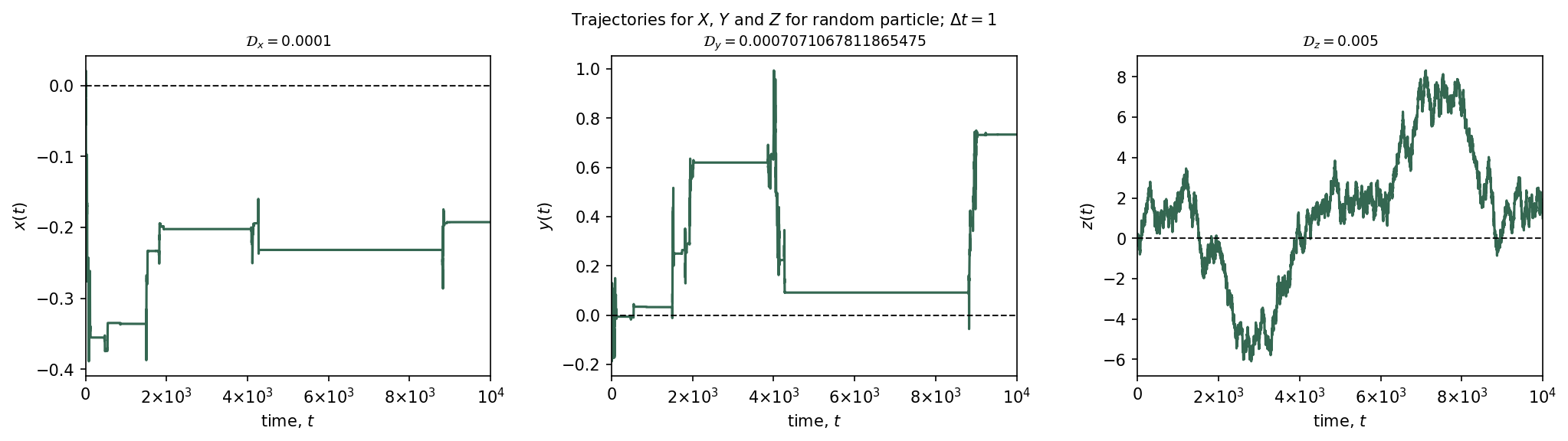
Dx: 0.000100
Dy: 0.000707
Dz: 0.005000
We define the start parameters and run/plot ensemble with \(10^4\) processes:
\(n = 10^4\) - Number of simulations
\(D_x = 0.0001\) - diffusion coefficient for \(x-\)axis
\(D_y = 0.0007\) - diffusion coefficient for \(y-\)axis
\(D_z = 0.05\) - diffusion coefficient for \(z-\)axis
\(dt=1\) - interval size or step size
\(tt = 10^4\) - total time for each simulation
\(\sigma=0.1\) - scaling factor for mimiced Dirac\(-\delta\) functions, \(A(y)\), \(B(z)\)
# Define parameters for BM process
n = 10_000 # Size of Ensemble
V = 0 # Drift for the diffusion process, v - external force (drift)
delta_t = 1 # dt = interval_size
y_starting = 0 # y0 - starting point
tt = 10_000 # tt - total time for each simulation
sigma_scale = 0.1 # scaling factor for Dirac mimic function, A(y), B(z)
# Run simulations
test = BrownianMotionLangevin(ensemble_size=n,
ensemble_type='3d',
drift=V,
diffusion_coefficients=[Dx, Dy, Dz],
reset_rate=None,
sigma=sigma_scale,
y0=y_starting,
simulation_time=tt,
dt=delta_t,
plt_traj=False,
plt_msd=False)
print("\nSolution is with size: ", np.shape(test.solution))
----- Started calculating ensemble (3D, NO RESET) ----
100%|██████████| 10000/10000 [1:11:20<00:00, 2.34it/s]
Solution is with size: (10000, 3, 10001)
Shape of solution:
(s1, s2, s3) = np.shape(test.solution)
print("no. simulations: {x}".format(x=s1))
print("no. dimensions: {x}".format(x=s2))
print("no. time points: {x}".format(x=s3))
no. simulations: 10000
no. dimensions: 3
no. time points: 10001
Plot the 3 trajectories for random process out of the Ensemble:
# Matplotlib subplot
BrownianMotionLangevin.plot_trajectories(test)
Results¶
3D comb random walk:
# Plotly, interactive plot
from plotly.offline import plot, iplot, init_notebook_mode
from IPython.core.display import display, HTML
init_notebook_mode(connected = True)
config={'showLink': False, 'displayModeBar': False}
# Convert to list
motions = test.solution
# Pick motion at random
rand_motion = random.randint(0, n-1)
r = motions[rand_motion]
# Create 3d trace
trace = go.Scatter3d(
x=r[0],
y=r[1],
z=r[2],
mode='lines',
name="Trajectories position",
opacity=0.8,
hovertemplate =
'<i>X</i>: %{x:.2f}'+
'<br><i>Y</i>: %{y:.2f}<br>'+
'<br><i>Z</i>: %{z:.2f}<br>',
line=dict(color="#346751",
width=2))
# Add layout
layout = go.Layout(title="3D backbone random walk",
title_x=0.5,
margin={'l': 50, 'r': 50, 'b': 50, 't': 50},
autosize=False,
width=450,
height=500,
xaxis_title='<i>X</i>, position',
yaxis_title='<i>Y</i>, position',
plot_bgcolor='#fff',
yaxis=dict(mirror=True,
ticks='outside',
showline=True,
showspikes = False,
linecolor='#000',
tickfont = dict(size=11)),
xaxis=dict(mirror=True,
ticks='outside',
showline=True,
linecolor='#000',
tickfont = dict(size=11))
)
data = [trace]
figa = go.Figure(data=data, layout=layout)
plot(figa, filename = '3d_random_walk.html', config = config)
display(HTML('3d_random_walk.html'))
Save all 3 distributions:
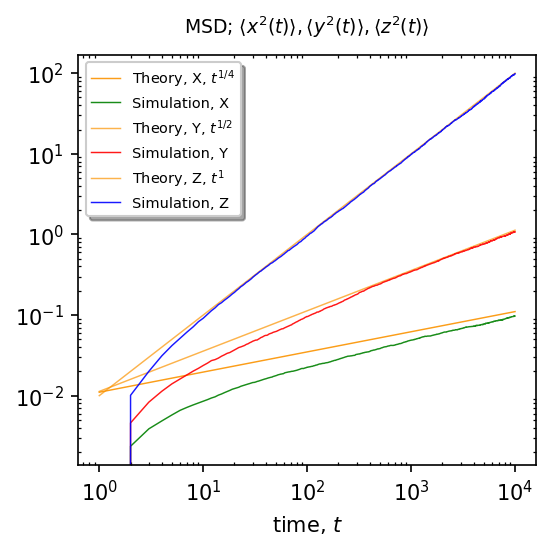
C. Mean square displacement¶
The returning probability of the Brownian particle from the finger to the backbone corresponds to the waiting time PDF for the particle moving along the backbone, so for Brownian motion it scales as \(\sim t^{-3/2}\).
From the CTRW theory we know that such waiting times leads to anomalous diffusion with MSD given by:
\(\langle x^{2}(t)\rangle\sim t^{1/4}\)
\(\langle y^{2}(t)\rangle\sim t^{1/2}\)
\(\langle z^{2}(t)\rangle\sim t^{1}\)
Results¶
\(\langle x^{2}(t)\rangle = x_0^2 + 2 \mathcal{D}_1 \frac{t^{1/4}}{\Gamma(\frac{5}{4})}\)¶
Where:
\(x_0\) = 0
\(\mathcal{D}_1=\frac{\mathcal{D}_x}{2\sqrt{2\mathcal{D}_y\sqrt{\mathcal{D}_z}}}\)
\(\Gamma(\frac{5}{4}) = \Gamma(1.25)=0.906\)
\(\langle y^2(t)\rangle = 2\mathcal{D}_2\frac{t^{1/2}}{\Gamma(\frac{3}{2})}\)¶
Where:
\(\mathcal{D}_2=\frac{\mathcal{D}_y}{2\sqrt{\mathcal{D}_z}}\)
\(\Gamma (\frac{3}{2}) = \frac{\sqrt{\pi}}{2}\) = 0.886
\(\langle z^2(t)\rangle = 2\mathcal{D}_3t^1\)¶
Where:
\(\mathcal{D}_3=\mathcal{D}_y\)
BrownianMotionLangevin.plot_msd(test)
-------------------MSD, no stochastic resetting---------------------
Dist. for X has shape: (10000, 10001)
Dist. for Y has shape: (10000, 10001)
Dist. for Z has shape: (10000, 10001)
---------Started calculating MSD, X, no stochastic resetting--------
100%|██████████| 10000/10000 [01:39<00:00, 100.56it/s]
---------Started calculating MSD, Y, no stochastic resetting--------
100%|██████████| 10000/10000 [01:41<00:00, 98.26it/s]
---------Started calculating MSD, Z, no stochastic resetting--------
100%|██████████| 10000/10000 [01:40<00:00, 99.22it/s]